 Elméleti
kutatások: Elméleti
kutatások:
-
Egyszerű kerékpár modell alkalmazása LQ controller fejlesztésére, a jármű
oldalstabilitásának növelése érdekében.
-
Passzív és szabályozott járműrendszerek érzékenység vizsgálata, különös
tekintettel az időkésedelem hatására a hátsó tengely kormányzására
-
RLQL fejlesztése aktív hátsókerék kormányzáshoz.
Teszt
jármű: Egy, a hallgatók által épített négykerék kormányzású autó.
|
 Menetstabilitás-szabályozás
járműszerelvényeknél Menetstabilitás-szabályozás
járműszerelvényeknél
Szabályozás
összecsuklás ellen:
-
Harmadik tengelyükön hajtott csuklós autóbuszok - felépítésükből eredő
- stabilitási problémáinak vizsgálata.
-
Összecsuklási problémák vontatók / nyergesvontatók esetén.
-
Félaktív vontatónyomaték-szabályozás nehéz haszonjárműveknél.
|
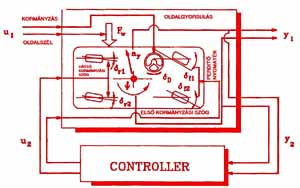 Perdítő
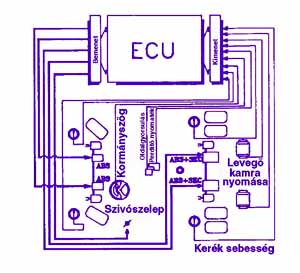
nyomaték szabályozása DSC rendszerekkel Perdítő
nyomaték szabályozása DSC rendszerekkel
Az AUBC előnyei: - A stabilizáló nyomatékot egy már meglévő berendezés - maga a fékrendszer - biztosítja, semmilyen drága segédberendezés nem szükséges. -
Csupán néhány további érzékelőt igényel, melyek alacsony költséggel beszerezhetőek.
-
Az AUBC működéséhez többnyire az ECU szoftverét kell módosítani.
-
A rendszer kétféleképpen működhet: közvetlen módban, mint önálló rendszer,
ekkor nincs szükség a vezető beavatkozására.
- Közvetlen módban:
biztosítja az optimális fékerő elosztást a jármű kerekei közt.
|
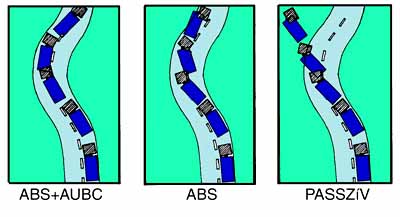 Tapadás
vizsgálatok járműszerelvényeknél: Tapadás
vizsgálatok járműszerelvényeknél:
- ABS-szel és ABS nélkül a jármű irányíthatatlanná vált. -
ABS-szel és négykerék-kormányzással irányítható maradt, de kissé instabil.
- AUBS-szel és ABS-szel
a jármű iránytartó maradt, még hirtelen fékezésekkor is.
|